
5 Minuty
V zatáčce? Zadní kola se rozhodnou jinak než přední. Krátké, překvapivé zrychlení. Klid. To je princip, který mění chování auta bez zásahu řidiče. Čtyřkolové řízení už není jen technický fígl pro inženýry; je to nástroj, který automobilům dává větší obratnost a stabilitu v krajních situacích.
Aktivní čtyřkolové řízení: jak to funguje
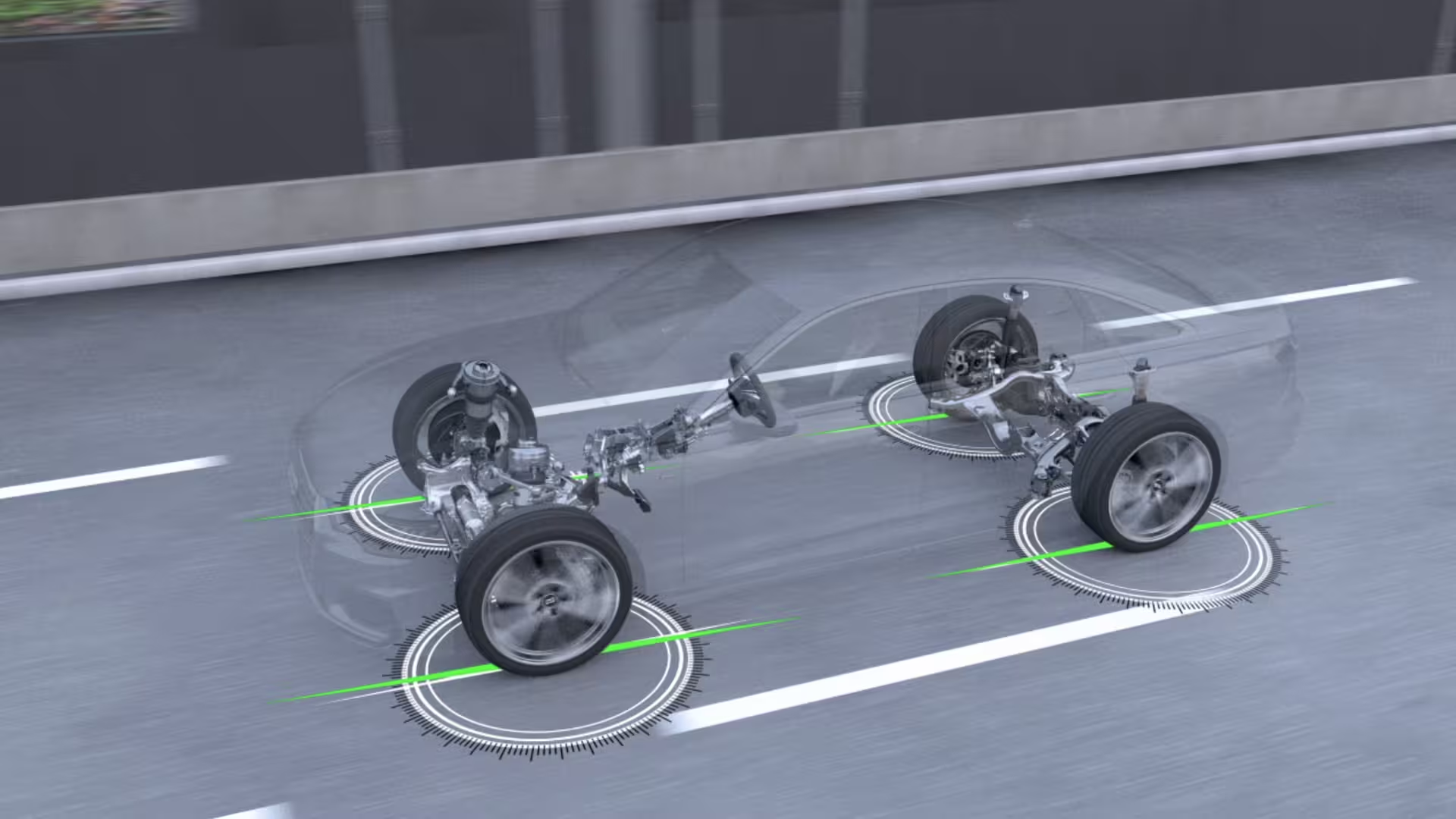
U aktivních systémů zadní kola neotáčejí náhodně. Elektronika, hydraulika nebo mechanická spojení pracují ve spolupráci se senzory a řídicí jednotkou. Ta vyhodnocuje rychlost, úhel natočení volantu, přetížení nebo yaw (rotaci vozu kolem svislé osy) a spočítá optimální úhel zadních kol. Při pomalé jízdě se zadní kola často natáčí opačně než přední. Výsledek? Nečekaně těsný poloměr otáčení a výrazně snazší parkování. Při vysokých rychlostech se naopak zadní kola naklánějí stejným směrem jako přední — to potlačí náhle změny směru a zvyšuje stabilitu při rychlých změnách jízdního pruhu.

Rozsah natočení zadních kol je obvykle malý: pod osm stupňů. Jenže i zlomek úhlu dokáže ovlivnit chování vozu citelně. Systémy jako HICAS od Nissanu ukázaly, že i relativně jemná korekce zlepší bezpečnost a plynulost ovládání. Nabízí se ovšem otázka spolehlivosti. Přidat do podvozku další elektroniku a mechaniku znamená vyšší složitost a potenciál závad. Co když systém selže ve chvíli, kdy ho nejvíc potřebujete? Konstrukce musí zahrnovat redundanci a bezpečnostní režimy, které při poruše okamžitě vrátí řízení do „tradičního“ stavu.
Pasivní zadní řízení: méně složitosti, méně možností
Ne každé řešení musí být aktivní. Pasivní systémy spoléhají na nastavení zavěšení a speciální silentbloky (ložiska, bushings), které při změně zatížení vzájemně mění toe‑úhel zadních kol. Jinými slovy: konstrukce nápravy a její pružení jsou navrženy tak, aby při průjezdu zatáčkou nebo při deceleraci docházelo k jemnému natočení zadních kol bez elektrických pohonů.
Porsche se s touto otázkou setkalo už při vývoji modelu 928. Původní zadní závěs způsoboval, že při uvolnění plynu v zatáčce docházelo k obrácenému efektu — vnější zadní kolo se natáčelo ven a auto mělo tendenci k přetáčivosti. Řešením bylo přepracovat zadní nápravu tak, aby při zpomalení docházelo k mírnému přitažení zadních kol dovnitř; tím se stabilita zvýšila a přetáčivost poklesla. Zajímavé je, že požadovaný efekt často vyvolá změna v desetinkách stupně, jemnost je klíčová.
Pasivní systémy mají výhodu nižších nákladů a menší technické složitosti. Na druhou stranu nemohou nabídnout adaptivitu aktivních řešení — žádné režimy pro nízké a vysoké rychlosti, žádné rychlé změny podle dat ze senzorů.

Krátká historie a technické milníky
Myšlenka použití zadních kol pro korekci vedení vozu má v automobilovém průmyslu několik klíčových dat. Porsche uvedlo tzv. Weissach Axle v 928 už v roce 1977 a tím nastartovalo rozšíření pasivních řešení. Aktivní čtyřkolové řízení přišlo později: Nissan nabídl HICAS v roce 1985 na modelu R31 Skyline a Honda následovala s Prelude v roce 1987. Postupně se do hry zapojily další značky — Mitsubishi, Renault, Ferrari, BMW a další — a dnes existují různé implementace, od mechanických přes hydraulické až po plně elektronické.
Technologický kontext se mezitím změnil. Moderní vozidla disponují sítí senzorů, rychlými řídicími jednotkami a sofistikovanými stabilizačními algoritmy, takže integrace čtyřkolového řízení do širších asistenčních systémů je dnes přirozená. Systémy se také propojují s adaptivním podvozkem, brzdami a asistencí při jízdě v pruzích — to otevírá nové možnosti pro autonomní a poloautonomní řízení.
Expert Insight
"Drobné změny v natočení zadních kol mohou dramaticky změnit dynamiku vozu," říká Ing. Pavel Novotný, specialista na podvozkové systémy. "Není to trik. Je to otázka fyziky: změnou polohy kontaktové hranice mezi pneumatikou a vozovkou ovlivníte rozdělení sil a následnou reakci vozu. Klíčové je, aby systém fungoval prediktivně, nikoli reaktivně."
Budoucnost? Více propojení. Více adaptivity. A v autech vyšších tříd i běžněji dostupné řešení, které kombinuje výhody aktivních a pasivních přístupů. A možná i možnost volby režimu řízení podle stylu řidiče. Kdo by nechtěl auto, které parkuje samo s lehkostí skútru, ale při vysoké rychlosti se chová jako přísný, stabilní koráb na dálnici?
Nechť každé zatáčení nabídne novou lekci z dynamiky — a bezpečnější cestu domů.
Zanechte komentář