
10 Minuty
Buick Electra L7 vítězí v čínském testu AD, Tesla zaostává
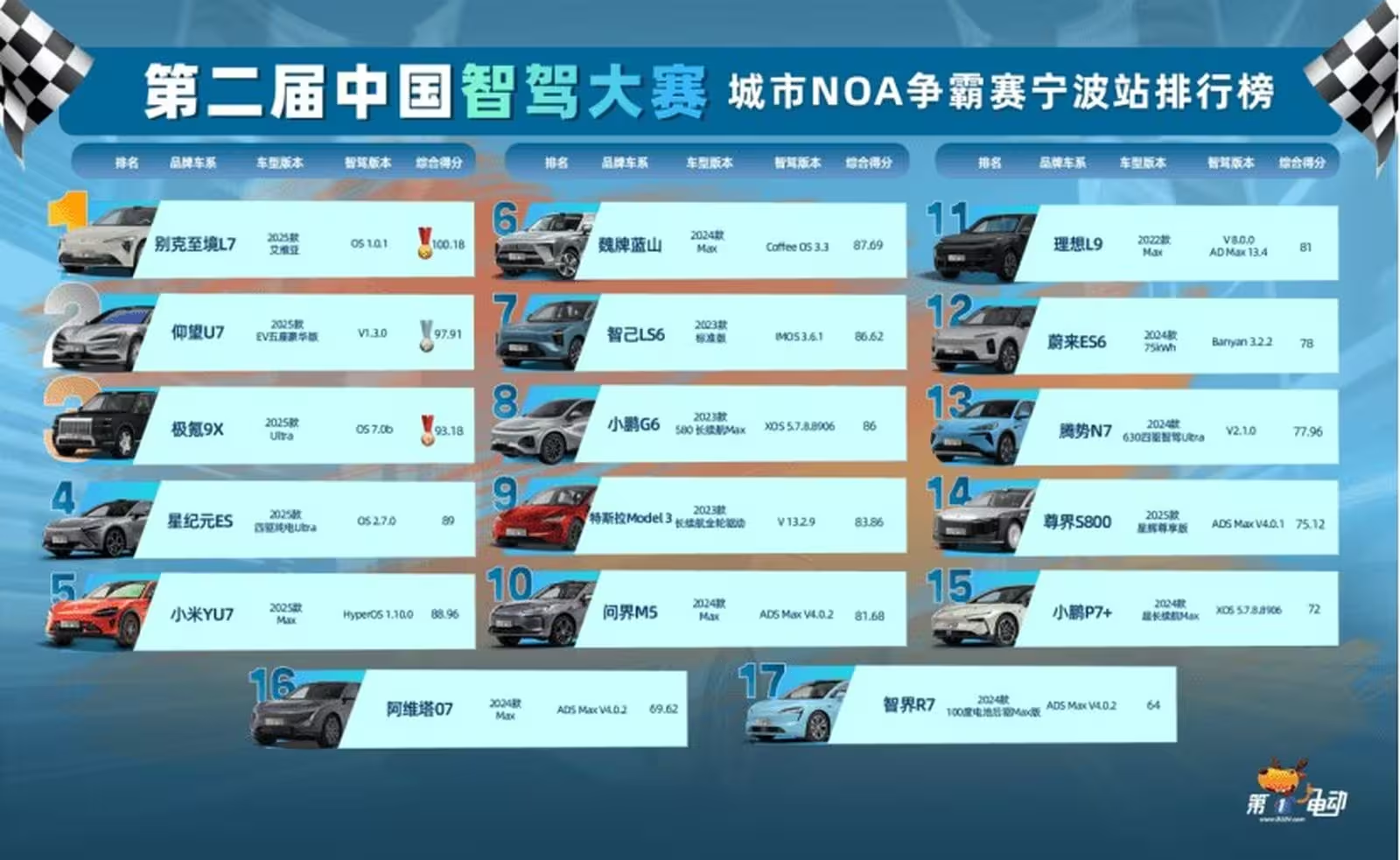
Jen několik dní poté, co Tesla investorům slíbila, že plná autonomie je na dosah, nezávislá soutěž v autonomním řízení v Číně vyslala zcela jiný signál. Akci organizovala platforma D1EV v Ningbo, provincie Zhejiang, a v rámci druhého ročníku China Intelligent Assisted Driving Competition obsadil vůz SAIC-GM Buick Electra L7 první místo v poli 17 soutěžících vozů. Tesla Model 3 skončila zklamáním na devátém místě. Tento rozdíl mezi korporátní rétorikou a výsledky nezávislého testu ukazuje, jak náročné je převést vývoj umělé inteligence a autonomních systémů do spolehlivého chování v reálném provozu.
Trať měla 29 kilometrů a kombinovala městské i venkovské úseky — obsahovala 28 semaforů, pět kontrolních bodů (waypoints) a osm náročných testovacích úseků. Trasa byla záměrně utajená, aby se předešlo tomu, že týmy nasadí „přeučené“ konfigurace optimalizované pro konkrétní scénáře. Tato anonymita vedla k přirozenému vystavení systémů širokému spektru reálných situací a odhalila skutečné silné a slabé stránky pokročilých asistenčních systémů (ADAS) a autonomních software stacků. Pro hodnocení hrály roli nejen senzory a modely AI, ale i mapové podklady, lokalizace a strategie fail-safe v případě nejistoty.
Klíčové výsledky
- 1. místo: Buick Electra L7 (SAIC-GM) — 100.18 bodů
- 2. místo: BYD YangWang U7 — 97.91 bodů
- 3. místo: Geely Zeekr 9X — 93.18 bodů
- 5. místo: Xiaomi YU7 — 88.96 bodů
- 9. místo: Tesla Model 3 — 83.86 bodů

Tato výsledková tabulka podtrhuje širší trend: v Číně řada tradičních výrobců i technologických firem rychle posunula hranici ADAS funkcí, často kombinujíc LiDAR, RADAR, kamery a sofistikovanou senzorovou fúzi spolu s vysokovýkonnými mapami a velkými AI modely pro percepci a plánování. Investice do vysoké přesnosti lokalizace a redundance senzorů se v takových testech ukazují jako konkurenční výhoda; často rozhodují o tom, zda systém rozpozná neobvyklé překážky, správně vyhodnotí jízdní manévr nebo bezpečně dokončí složitou sekci trati.
Proč zvítězil Electra L7
Electra L7 je rozšířená verze elektrického vozu typu EREV od SAIC-GM, která kombinuje úsporný pohon s robustním autonomním stackem. Klíčovým faktorem se ukázalo, že Electra L7 byla prvním vozidlem v soutěži vybaveným platformou Momenta R6 Flywheel Big Model AD pro systém Navigate on Autopilot (NOA). Momenta vyvinula velké modely pro percepci a plánování, které kladou důraz na multi-senzorovou fúzi — především na integraci LiDARu — a právě tato kombinace se na trati ukázala jako rozhodující. Velký model Momenta zjednodušuje interpretaci scén a dává přednost robustnímu rozhodování v situacích s omezenou vizuální informací nebo s neobvyklými objekty v zorném poli.

Několik segmentů tratě tu výhodu jasně zvýraznilo. Uměle vytvořená průhledná plastová obrazovka, použitá k simulaci překážky s nízkým kontrastem a špatnou viditelností, byla spolehlivě detekována pouze šesti vozy: Li Auto L9, YangWang U7, Nio ES6, Buick Electra L7, Zeekr 9X a Xiaomi YU7 — všechny byly vybaveny LiDARem. Systémy založené čistě na vidění (vision-only), včetně Tesly s jejím FSD/Intelligent Assisted Driving, tuto překážku přehlédly. To potvrzuje technické omezení monocentrických kamerových přístupů v kombinaci s realitou, kdy průhledné či nízko- kontrastní objekty nevyvolají dostatečný vizuální signál k jisté detekci bez doplňkových senzorů.
Technické vysvětlení spočívá v tom, že LiDAR generuje přímé vzdálenostní měření návratem laserového paprsku, takže i slabě kontrastní nebo průhledné prvky často vrátí signál, který lze v kombinaci s modelem AI vyhodnotit jako překážku. Multi-senzorová fúze pak umožňuje, aby nesoulad mezi senzory (např. kamera vs. LiDAR) vedl k opatrnému plánování a případnému přerušení automatického režimu do bezpečného stavu.
Výzvy tratě a chování systémů
Trať kombinuje úzké obytné uličky, kruhové objezdy, obrácené zatáčky s omezeným výhledem (blind-turn U-turns), venkovské komunikace a zkonstruované překážky; cílem bylo testovat navigaci, volbu jízdního pruhu, detekci překážek i rozhodovací logiku. Testovací plán obsahoval scénáře, které simulují běžné i méně časté situace, tedy reálné podmínky, kam směřují implementace ADAS a NOA v běžném provozu. Mezi hlavní body patří:
- Úzké silnice: Navrženy k prověření přesnosti řízení a schopnosti vyhnout se překážkám; u tří vozů došlo k požadavku na převzetí řízení řidičem (Wey 07, Xiaomi YU7, Xpeng G6), což ukazuje rozdíly v agresivitě vyhodnocení rizika systémů.
- Kruhové objezdy: Všechny vozy je projely úspěšně, což naznačuje celkové zlepšení logiky volby jízdního pruhu a adaptivního řízení v městských situacích napříč trhem.
- Obrácené zatáčky s omezeným výhledem (blind-spot U-turns): Několik vozů se zde potýkalo s problémy; Nio ES6 a Xpeng G6 vyžádaly zásah řidiče, zatímco Denza N7 odjel z plánované navigační trasy.
- Umělá průhledná překážka: Spolehlivě ji detekovaly pouze vozy s LiDARem, což podtrhuje význam senzorů pro bezpečnou detekci nízko kontrastních hrozeb.
- Matoucí trasa U-otáčky: Několik modelů zvolilo nesprávnou cestu nebo vyžádalo zásah, což odhalilo slabiny v rozumění trasy při nejednoznačném značení a v rozhodování v podmínkách omezené evidence.

Dvě další scénáře — křižovatka s odbočením vpravo spojená s požadavkem na U-otáčku a slabě frekventovaná venkovská silnice — dále rozdělily soutěžící. Tesla Model 3 zvládla test pravého odbočení, ovšem chyběla jí konzistence napříč celou trasou; nedostatečná konzistence ve více segmentech přispěla k jejímu umístění v prostředku startovního pole. Konzistence, opakovatelnost a robustní chování za různých okolností byly klíčovými metrikami výkonu, které organizátoři i pozorovatelé považovali za důležitější než jednorázové úspěšné manévry.
Co to znamená pro Teslu a trh autonomního řízení
Tesla veřejně akcentuje ambice směrem k umělé inteligenci, robotaxi službám a plné autonomii; Elon Musk opakovaně uváděl cíle, včetně slibů ohledně nesupervizovaného řízení. V Severní Americe se diskuse často soustředí na rivalitu Tesla vs. Waymo, přičemž Waymo provozuje řízené bezřidičské služby v omezených zónách. Čínský trh je ale hustě obsazeným a rychle se měnícím prostorem: místní automobilky a technologické firmy integrují LiDAR, vysoce přesné mapování a přístupy s velkými modely AI, aby zvýšily robustnost AD funkcí v komplikovaném mixu městských i venkovských prostředí.
Tato soutěž dává několik zásadních podnětů k úvaze:
- Volba senzorů má význam. Systémy vybavené LiDARem prokázaly jasnou výhodu v detekci překážek a v povědomí o scéně, zejména u průhledných nebo nízko kontrastních hrozeb. LiDAR přidává do fúze dat nezávislý vrstvu informace o vzdálenosti, která zvyšuje jistotu rozhodování modelů pro percepci a plánování.
- Sliby „end-to-end“ neznamenají konzistentní výkon v polních podmínkách. Jedno úspěšné demo či optimistické prohlášení pro investory nenahradí opakované a různorodé testování v reálných podmínkách a soutěžích. Důležitější než marketingová proklamace je opakovaně ověřená spolehlivost a vysvětlená strategie redundance a fail-safe chování.
Kontext trhu a produktů
Vítězství Electra L7 posiluje důvěryhodnost SAIC-GM v prostředí, kde spotřebitelé i regulátoři kladou rostoucí důraz na bezpečnost ADAS a na validaci v reálných podmínkách. Pro Teslu je výsledek připomínkou, že přístupy založené výhradně na vidění stále narážejí na limity v určitých use-casech — zvláště když do hry vstupují velké modely pro percepci a fúze s LiDARem. Z obchodního hlediska to může motivovat větší spolupráce mezi výrobci automobilů a specialisty na AI a senzory, stejně jako tlak na standardizovaná testovací kritéria a transparentní reportování výsledků bezpečnostních testů.
Citace: "Electra L7 prokázala konzistentní rozhodování napříč rozmanitými scénáři," uvedl jeden z pozorovatelů soutěže. "Právě to bude mít pro zákazníky a provozovatele flotil rozhodující váhu při výběru vozů s AD funkcemi." Tento komentář zdůrazňuje, že provozovatelé flotil i jednotliví zákazníci více hodnotí předvídatelné chování, snadnost integrace do existujících provozních procesů a transparentnost v otázkách aktualizací softwaru a podpory.
Pohled do budoucna
Očekávejte další kola testování a veřejné demonstrace, jak automobilky dolaďují své NOA a ADAS funkce. Dynamika v Číně pravděpodobně podpoří další partnerství mezi výrobci vozidel (OEM) a AI firmami, jako je Momenta, a může urychlit adopci LiDARu v segmentech od střední po vyšší třídu. Klíčovým faktorem bude i cenová dostupnost senzorů a jejich integrace do výrobních platforem tak, aby byla zajištěna ekonomická udržitelnost nasazení v měřítku flotil.
Pro řidiče a nákupčí flotil je hlavní poučení jednoduché: soustřeďte se na ověřený výkon systému v reálných podmínkách místo na sliby. Soutěže jako D1EV odhalují systémy v skrytých, rozmanitých scénářích — což je silnější měřítko připravenosti než scénářované dema nebo interně řízené prezentace. Důkladné zkoušky reálného chování, transparentní reporting selhání a jasné strategie pro upgrade softwaru by měly být součástí procesu výběru.
Hlavní body
- Akce: Second China Intelligent Assisted Driving Competition, Ningbo
- Trať: 29 km, 28 semaforů, 5 waypoints, 8 testovacích lokalit
- Vítězná technologie: Momenta R6 Flywheel Big Model AD na voze Buick Electra L7
- Důsledek: LiDAR + fúze s velkými modely AI aktuálně překonává řešení založená pouze na vidění v komplexních scénářích
Jak se závod o autonomní řízení vyostřuje, vítězi budou ty týmy, které prokáží bezpečný, opakovatelný výkon napříč nepředvídatelnými, reálnými silnicemi. Tento test ukazuje, že Tesla má v čínském kontextu ještě domácí úkoly, zatímco zavedení a lokální producenti rozvíjejí své výhody prostřednictvím nových senzorových sad a partnerství v oblasti umělé inteligence. Pro spotřebitele i provozovatele flotil to znamená, že investice do systémů s ověřitelnou historií bezpečného chování a jasnými mechanizmy na řešení chyb bude rozhodujícím faktorem při výběru technologického řešení autonomního řízení.
Zdroj: autoevolution
Zanechte komentář